Sissejuhatus
1. Mis on robot? Maailma esimene robot.
Robot on mehaaniline intelligentne seade, mis on võimeline iseseisvalt või välise abiga (inimese poolt) ülesandeid lahendama. Praktikas on robot tavaliselt elektromehhaaniline masin, mida juhib arvuti.
Maailma esimesed robotid ehitati eelmise sajandi 60-ndatel aastatel tehase tootmistöö jaoks. Kõige esimeseks robotiks loetakse 1961. aasta kevadel tööd alustanud General Motors’i autotehase robotit nimega Unimate (vt. joonis). Selle roboti ülesandeks oli valuvormi valatud auto uste käepidemete basseinis jahutamine, et need seejärel edasiseks töötlemiseks liinile suunata. Töö oli inimesele ohtlik, sest valuvormist tuli välja võtta kuumusest veel punaseid detaile, mis lisaks levitasid inimesele ohtlikke gaase. See polnud muidugi võrreldav kõndiva metallist inimesesarnase robotiga (humanoidiga), nagu nähtud filmides „Terminaator“ või „Mina, Robot“, aga tänu Unimate’ile ei pidanud inimene esimest korda ühe autoosa valmistamisel mitmele operatsioonile kätt külge panema.

2. Robotite arendamis põlvkonnad.
Robotid võib oma arengutasemelt jagada kolme põlvkonda:
- Esimene põlvkond. Esimese põlvkonna robotid olid lihtsa ehitusega ning neil puudusümbrusetaju ehk andurid. Oma tööd suutsid nad teha vaid mittemuutuvates tingimustes.Näiteks robotkäsi, mis tõstab õlletehases pudeleid kastidesse. Robot sooritab identseidliigutusi, aga kuna tal ei ole ümbritsevast keskkonnast mitte mingit signaali, st ta ei saa omategevuse kohta mittemingisugust tagasisidet, siis keskonna muutuse korral ta enam ei töötakorralikult. Selliseid roboteid tänapäeval enam ei loetagi õigeteks robotiteks. (nt fikseeritud liikumisega robotkäsi)
- Teine põlvkond. Teise põlvkonda kuuluvad robotid , mis suudavad andurite läbireageerida keskkonnas toimuvatele muutustele. Kuna robot suudab keskkonda tunnetada, siisroboti efektiivsus oleneb suures osas tarkvarast, mis teda juhib. Ka antud kursuse käiguskasutatavad robotid kuuluvad kõik teise põlvkonda, kui kasutada neil andureid keskkonnatunnetamiseks ning programmeerida nad iseseisvalt tegutsema. (nt nõudepesumasin, automaatselt süttiv lamp)
- Kolmas põlvkond. Kolmas põlvkond on veel väljatöötamisel. Kolmanda põlvkonna robotidsuudavad olukordi analüüsida ning õppida. Näiteks filmis „Mina, Robot” olev robot, mis suudabjäreldusi teha ning sellest õppida, on kolmandast põlvkonnast. (nt ise keeli õppiv robot)
3. Miks manipulaatorid ei ole robotid?
Manipulaator on seade või masin, mida inimene juhib. Erinevalt väärarusaamadest pole manipulaatorid robotid, kuna neid juhib vahetult inimene. Manipulaatorid pole võimelised autonoomselt töötama. Manipulaatorite tööks vajalikku informatsiooni saadakse läbi inimese meeleelundite ning see informatsioon töödeldakse inimese peas
4. Mis on masinate eelised võrreldes inimtööjõuga?
Kuna robotid on mehhaanilised seadmed, siis nad ei väsi ega tüdine, mis teeb nad ideaalseteks rutiinse töö tegijateks. Seepärast kasutatakse roboteid paljudes tööstusettevõtetes üksluise töö kiiremaks ning kvaliteetsemaks tegemiseks. Lisaks ei ole robotid nii tundlikud töötingimuste koha pealt kui inimesed, neid saab kasutada ka mürarikastes halvasti valgustatud töökohtades ja isegi sellistes kohtades, kus inimese töötamine on eluohtlik kiirguse vms tõttu. Roboteid kasutatakse ka seal, kuhu inimesi ei saa saata tööd tegema, nt ookeanipõhja uurima ja Marsile. Peale selle saab roboteid kasutada ka meelelahutuslikel eesmärkidel. Näiteks intelligentsed mänguasjad ja tantsivad robotid.
5. Millised kolm tingimust peavad olema täidetud, et teatud masinat või seadet saaks robotiks nimetada?
Robotiks võib pidada igasuguseid süsteeme, millel on andur, kontroller ja täitur. Andur annab kontrollerile informatsiooni välismaailma kohta, kontroller töötleb seda ja juhib seadme tegevust ja täitur on seade roboti enda või mõne temaga seotud konstruktsiooni liigutamiseks või lülitamiseks.
6. Millistes Eesti tööstusettevõtetes võiksid mehhatroonikud töötada?
Mehhatroonikud Eestis saavad töötada järgmistes valdkondades ja ettevõtetes:
- Automaatika ja robotite valdkond: Cleveron, Estonian Cell.
- Tehnoloogia ja elektroonika: Telia Eesti, Ensto, Ericsson Eesti.
- Masinatööstus: AS Norma, Konesko.
- Toiduainetööstus: Rakvere Lihakombinaat, Tallinna Piimatööstus.
- Energia ja keskkonnatehnoloogia: Eesti Energia, Sillamäe Keemiatööstus.
- Täpstootmine ja teadus-arendus: Euronics, TalTech.
Kirjuta definitsioonid:
- Robot — Automaatne seade, mis on ette nähtud erinevate mehaaniliste toimingute teostamiseks vastavalt eelnevalt programmeeritud ajakavale.
- Robootika — ehk robotitehnika on teaduse ja tehnika haru, mis käsitleb robotite disaini, ehitust, tootmist ja töötamist. Robootika on tihedalt seotud mehaanika, informaatika, elektroonika ja muude teadusharudega.
- Manipulaator — ehk käsitsusseade on seade esemete pööramiseks ja teisaldamiseks, mis enamasti väljendab inimkäe liikumist. Manipulaatori konstruktsioonis saab eristada teisaldavat kätt, suunavat käelaba ja sõrmi asendavat haaratsit.
- Mehhatroonika — on mehaanika, elektroonika ja informaatika sünergeetilisel koostoimel põhinev rakendusteadus. Algselt ühendas mehhatroonika mehaanikat ning elektroonikat. Aja jooksul on aga mehhatroonika hõlvanud lisaks arvutisüsteemid, mikrosüsteemid ja telekommunikatsiooni.
- Andur — on seade, mis mõõdab mingit suurust ning teisendab selle elektriliseks signaaliks. Lihtsamalt
- öeldes on andur roboti jaoks meeleelunditeks, nagu inimesel on silmad, kõrvad, nina jne.
- Täitur — võib olla mistahes mõjutatav seade. Robotite täituriteks võivad olla näiteks mootorid, küttekeha jne
- Kontroller — on roboti aju
Elekter. Põhikomponeendid
Elekter/Электричество
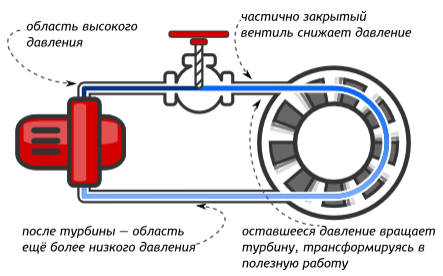
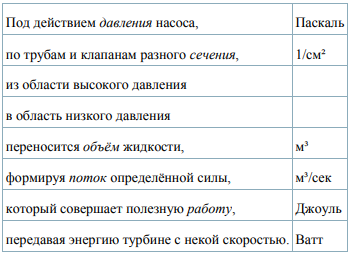
Гидравлическая система
Электрическая цепь
Принципиальные схемы
Чтобы изобразить на бумаге как должна выглядеть та или иная электрическая цепь
используют схемы. Схемы бывают разных видов со своими преимуществами и недостатками.
Ниже приведена одна и та же электрическая схема, изображённая по-разному, в четырёх
вариациях.
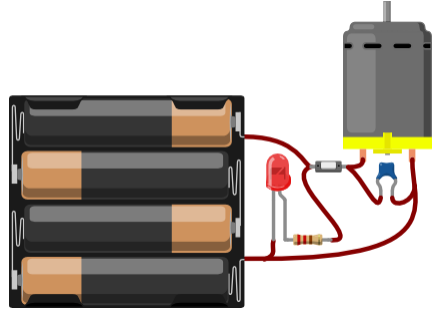
Рисованная схема
Красиво, но громоздко и непрактично:
Принципиальная схема
Компактно и наглядно:
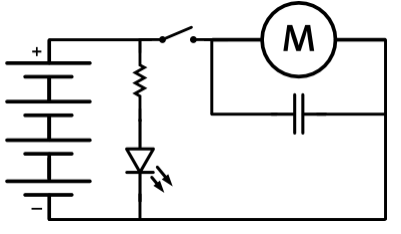
- То, что соединено линией, в реальности должно быть соединено проводником
- То, что не соединено линией, в реальности должно быть электрически изолировано
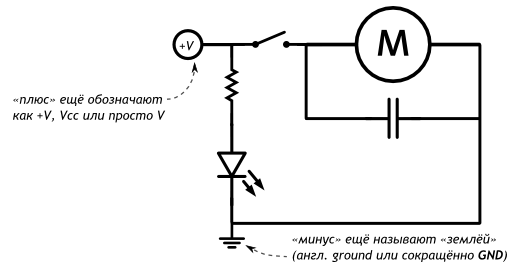
Принципиальная схема без явного источника питания
Источник питания зачастую не рисуют в явном виде, а используют отдельные символы для
плюса и минуса. Такая схема ещё более компактна.
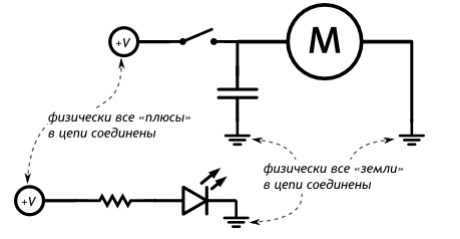
Принципиальная схема с отдельными контурами
Часто для удобства одну цепь на схемах разбивают на отдельные части. В сложных проектах
так добиваются наглядности и делят зоны ответственности между несколькими инженерами разработчиками.
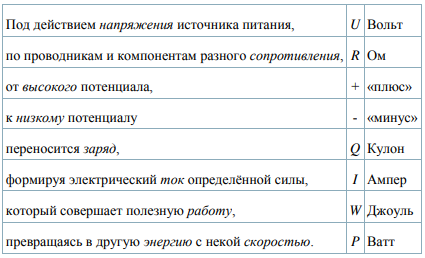
Основные законы электричества
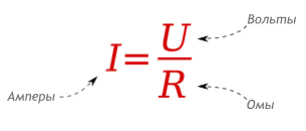
Закон Ома
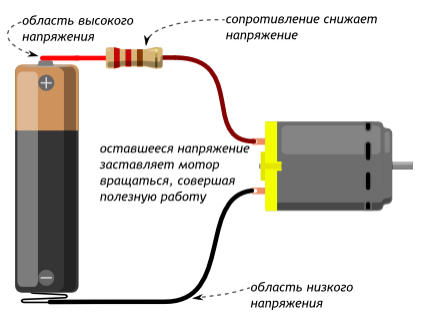
Закон Ома — главный закон электричества
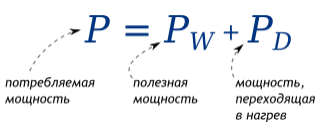
Мощность
Мощность — мера скорости трансформации электрической энергии в другую форму
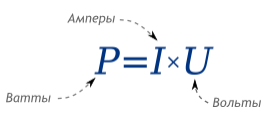
Зная закон Ома, можно заметить, что мощность можно рассчитать иначе:

Мир не идеален и часть электроэнергии непременно трансформируется в тепло. Из-за этого и
греются компьютеры, телефоны, телевизоры и другая электроника
Короткое замыкание
Соединение плюса с минусом напрямую, по закону Ома, приводит к очень
большому току, следовательно, к очень большой мощности нагрева, что в
итоге приводит к возгоранию.
Это называется коротким замыканием или в просторечии просто «козой».
Никогда не допускайте его, ни при каких обстоятельствах!
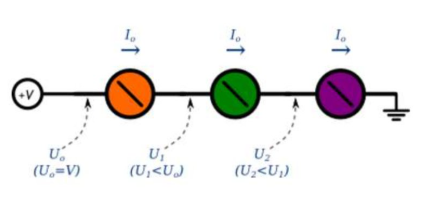
Последовательное подключение
При последовательном подключении сила тока в каждом потребителе — одна и та же,
различается напряжение: в каждом компоненте падает его часть.
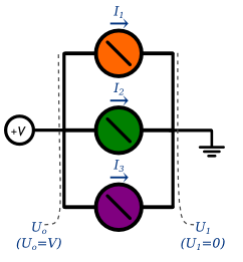
Параллельное подключение
При параллельном подключении напряжение вокруг каждого потребителя — одно и то же,
различается сила тока: каждый потребляет ток в соответствии с собственным
сопротивлением.
Микроконтроллер
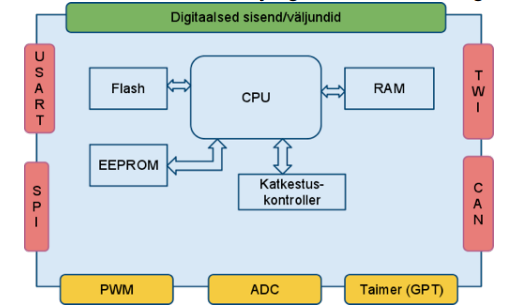
Микроконтроллер — это миниатюрный компьютер, основной задачей которого является выполнение инструкций программы. В отличие от обычного ПК, в одном чипе микроконтроллера находятся также оперативная память (RAM), энергонезависимая память (EEPROM), память программ (Flash), контроллер прерываний и различные встроенные интерфейсы для обмена данными. Центральным элементом является процессор, аналогичный процессору в обычном компьютере. На рисунке 1 показана схема микроконтроллера. Все сокращения поясняются далее в тексте.
Память микроконтроллера
Микроконтроллер использует два основных типа памяти:
🔹 Программная память (Flash)
Служит для хранения основной программы. Объём памяти влияет на сложность возможных программ.
- ATtiny (8-бит): 0.5–8 кБ
- ATmega: 4–256 кБ
- 32-битные контроллеры: до 512 кБ
🔹 Память данных (EEPROM)
Хранит данные даже после отключения питания (как мини-диск). Объём небольшой (например, у ATmega32 — 1024 байта), но можно подключить SD-карту для хранения больших объёмов.
Регистры
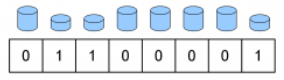
Регистры — это небольшие ячейки памяти с постоянным адресом и именем. Они управляют работой микроконтроллера: включают функции, задают направления выводов и считывают входные данные.
В 8-битных микроконтроллерах регистры обычно 8-битные, то есть состоят из 8 “переключателей”, каждый из которых отвечает за отдельную функцию.
Цифровые входы-выходы (Digital I/O)
Обычные входы-выходы микроконтроллера обмениваются цифровыми сигналами с внешними устройствами.
🔹 Направление работы можно задать программно через специальный регистр:
0— пин работает как вход1— пин работает как выход
🔹 Через другой регистр:
- если пин настроен как выход — можно записать 0 или 1
- если как вход — можно считать 0 или 1
Значения:
1— на пине подано напряжение (логическая 1)0— пин подключён к земле (логический 0)
Аналого-цифровой преобразователь (ADC)
Микроконтроллер работает только с цифровыми сигналами (0 и 1), но окружающий мир — аналоговый. Например, температура — это не просто “вкл/выкл”, а непрерывное значение.
Чтобы измерять такие величины, в микроконтроллер встроен аналогово-цифровой преобразователь (ADC). Он переводит аналоговый сигнал в цифровой, понятный для микроконтроллера.
🔹 Пример:
10-битный АЦП делит диапазон напряжения на 1024 уровня — это и есть его точность.
🔹 Важно: если нужно подключить несколько аналоговых датчиков, следует выбирать контроллер с нужным числом аналоговых входов.
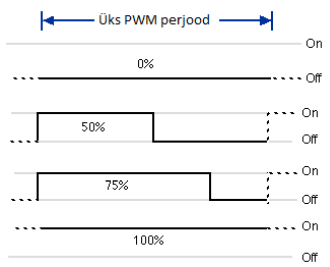
Широтно-импульсная модуляция (PWM)
PWM (Pulse-width Modulation) — это способ управления цифровым сигналом, позволяющий имитировать аналоговое поведение.
Вместо постоянного сигнала, микроконтроллер быстро переключает пин между высоким (1) и низким (0) состоянием с определённой частотой.
Ключевое — это длительность включённого состояния (ширина импульса):
- Чем дольше высокий уровень, тем выше среднее напряжение.
- Если включено половину времени, среднее напряжение ≈ 50% от питания.
🔹 Используется для регулировки яркости светодиодов, скорости моторов и т.п.
🔹 При высокой частоте устройства воспринимают сигнал как аналоговый.
PWM — пример
Если мотору 5 В подать только половину времени (через ШИМ), он будет вращаться как при 2,5 В.
Микроконтроллер быстро включает и выключает питание — мотор из-за инерции вращается плавно на нужной скорости.
🔹 В сервомоторах длительность сигнала управляет углом поворота.
Интерфейсы связи
Микроконтроллеры часто имеют:
- USART — последовательная связь
- SPI — быстрая синхронная
- I²C (TWI) — для датчиков
- CAN — в автоэлектронике
- USB — современный стандарт
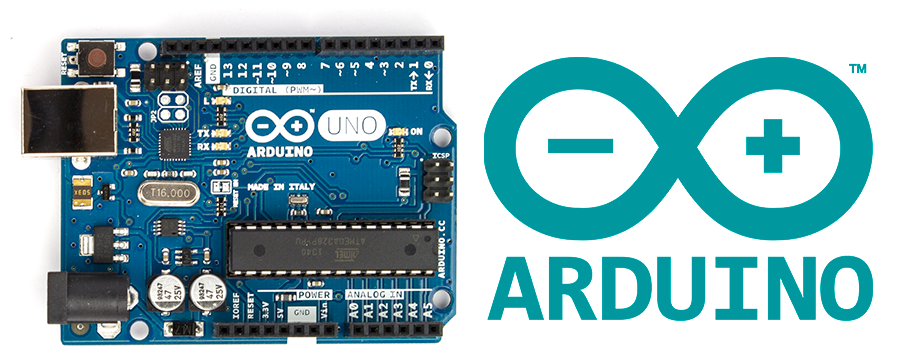
Составляющие платы Arduino Uno
Arduino on avatud lähtekoodiga mikrokontrollerplatvorm elektroonika prototüüpimiseks. Selle arendamist alustati 2005 aastal Itaalias ning on tänaseks saavutanud väga suure populaarsuse.
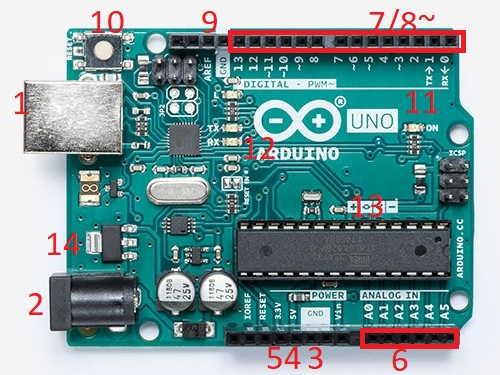
1. USB pistik (USB – Universal Serial Bus) port. USB pistiku abil saab Arduino arendusplaadile voolu anda ja programmikoodi laadida. Arduino kasutab USB B tüüpi pistikut./Разъем USB (USB Порт) – Может использоваться для питания схем, а также для связи с компьютером.
2. Voolupesa. Voolupessa saab ühendada voolujuhtme, millega Arduinole voolu anda. /Разъем Питания (от батареи) – Может использоваться с блоками питания 9 – 12 Вольт.
3. GND (GND – ground, eesti k maandus) pesad. Nende pesade kaudu käib vooluringi maandamine.
4. 5V (V – volt) pesa. 5V pesa kaudu saab arendusplaadi külge ühendatavaid lisakomponente varustada 5 voldise vooluga.
5. 3,3V pesa. 3,3V pesa kaudu saab arendusplaadi külge ühendatavaid lisakomponente varustada 3.3 voldise vooluga.
6. Analoogpesad (A0-A5) loevad signaali analoogsensoritest ja teisaldavad selle digitaalkujule, mida programm saab lugeda ja pärast signaali töötlemist digitaalpesa kaudu väljastada. Analoogpesa on võimalik vajadusel kasutada ka signaali väljastamiseks./Порты (Analog In, Power In, Ground, Power Out, Reset) – аналоговые, входящие, исходящие, питание и земля.
7. Digitaalsed pesad (D0-D13). Nende abil saab lugeda ja väljastada digitaalsignaali. 15
8. Pulsilaiusmodulatsiooni (Pulse-Width Modulation (PWM)) pesade abil saab simuleerida analoogväljundit./Порты (ARef, Ground, Digital, Rx, Tx) – опорное напряжение, земля, цифровые порты, порты приема и передачи данных.
9. AREF pesa abil saab vajadusel lisapesana lugeda kindla tugevusega analoogsisendit.
10. Lähtestamise nupp (Reset button) – Lähtestamise nupu vajutamisel taaskäivitatakse Arduino arendusplaadile laetud lähtekood. Kui programmi töö on katkenud saab nupu abil programmi taaskäivitada. Samuti on nupp mugav viis testimiseks, kui on tarvis koodi mitu korda jooksutada saab seda teha nupule vajutades. /(сброс) – ручной перезапуск платы Arduino, приводит к перезапуску вашей программы.
11. Toite LED (LED – Light-emitting Diode) tuli. Toite LED tuli läheb põlema, kui Arduino arendusplaat on ühendatud vooluvõrguga. Kui pärast vooluga ühendamist tuli ei lähe põlema, on oht, et arendusplaadiga on midagi valesti./Индикатор (Индикатор питания) – сигнализирует о подаче питания на плату Arduino.
12. TX (TX – Transmit) RX (RX – Receive) LED tuled – Nende LED tulede abil on aru saada, kui arendusplaat võtab andmeid vastu või saadab neid välja. Kui andmeid saadetakse, põleb TX LED tuli, kui andmeid vastu võetakse, põleb RX LED tuli./Индикатор (RX: Прием) – Используется для индикации приема данных, если конечно это прописано в программе. Индикатор (TX: Передача) – Используется для индикации передачи данных, если конечно это прописано в программе.
13. ATmega328P mikrokontroller, juhib Arduino Uno arendusplaadi tööd.
14. Pingeregulaator. Pingeregulaator reguleerib arendusplaadi vooluringi lastavat pinget. Kui pinge on liiga suur, muudab pingeregulaator selle plaadile sobivaks.
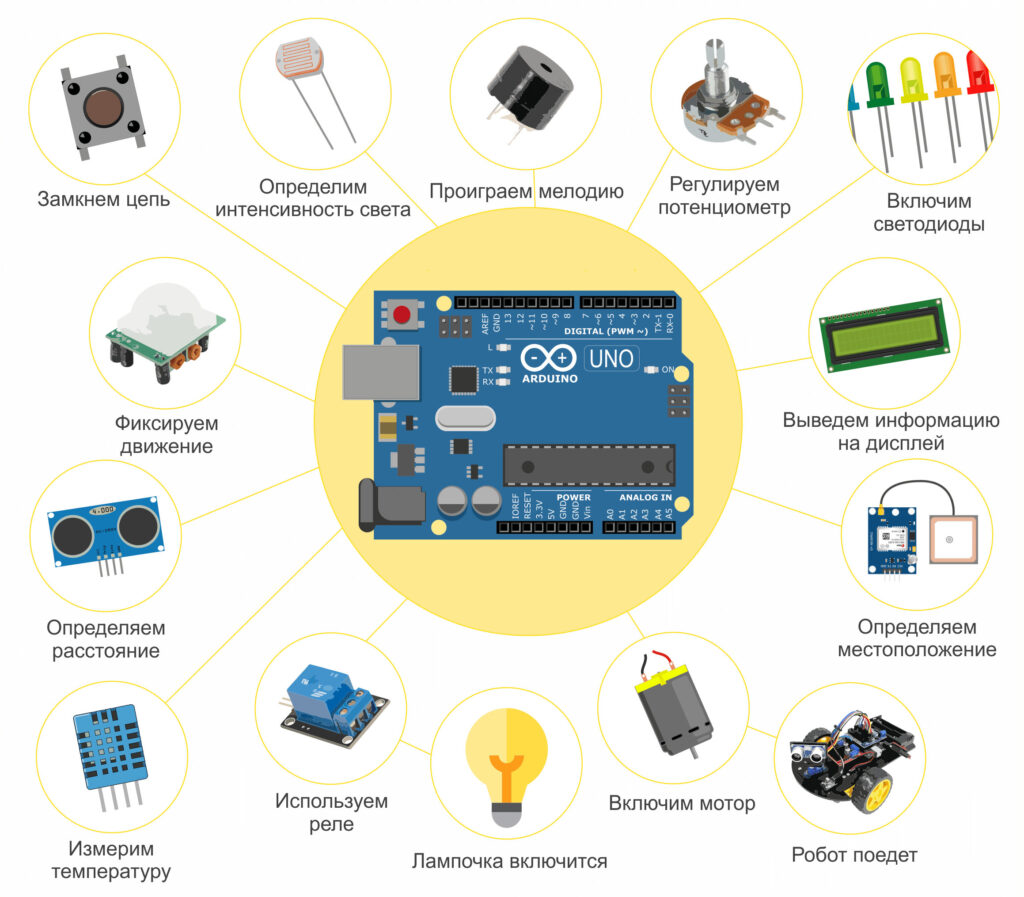
Основные компоненты Arduino
Selle külge saad ühendada erinevaid sisendeid. Näiteks termo-, valgus-, vibratsiooni-, heli- jt andurid. Edasi reageerib Arduino mikrokontroller vastavalt koodile ja käivitab mõne väljundseadme. Näiteks mõni mootor, valgusdiood, ekraan jne.
Входы (датчики):
- Фоторезистор (Fototakisti) — измеряет уровень освещения
- Температурный датчик (Temperatuuriandur) — измеряет температуру
- Потенциометр (Potentsiomeeter) — регулируемое сопротивление (ручка)
- Кнопка (Nupp) — простой цифровой вход
- Вибро-, звукo-, светочувствительные датчики — реагируют на окружающую среду
Выходы (устройства управления):
- Светодиод (LED) (Valgusdiood) — может загораться/мигать
- Пищалка (Пьезо) (Piesosummer) — издаёт звук
- Серводвигатель (Servomootor) — точное позиционирование
- Обычный мотор (Mootor) — вращение
- ЖК-дисплей (LCD) (Vedelkristallekraan) — для вывода текста и данных